
Hesaplamalı Şehircilik
Algoritmaların bir mahalle tasarlamasına izin verdik. Sonra inşa ettik.
Bir mahalleyi nasıl tasarlarsınız?
Geleneksel masterplanning sezgiye dayanır. Mimar deneyim ve örneğe dayalı bir plan çizer. Belki işe yarar. Belki yaramaz. İnsanlar taşınana kadar bilemezsiniz.
Biz farklı bir şey denedik. Her gün alanda yürüyen 127.000 yayayı simüle ettik. 5.000 farklı bina düzenlemesini test ettik. Çelişen hedefler için optimize ettik: yoğunluğu maksimize et, yürünebilirliği maksimize et, güneş ışığını maksimize et, rüzgarı minimize et.
Algoritma kendi başımıza çizmeyeceğimiz bir şey buldu. Binaları eşit dağıtmak yerine beş mini-merkeze kümeledi. Bu kalıp, Jane Jacobs'ın gelişen mahallelerde gözlemlediğiyle örtüşüyor. Ama biz bunu hesaplamalı olarak keşfettik.
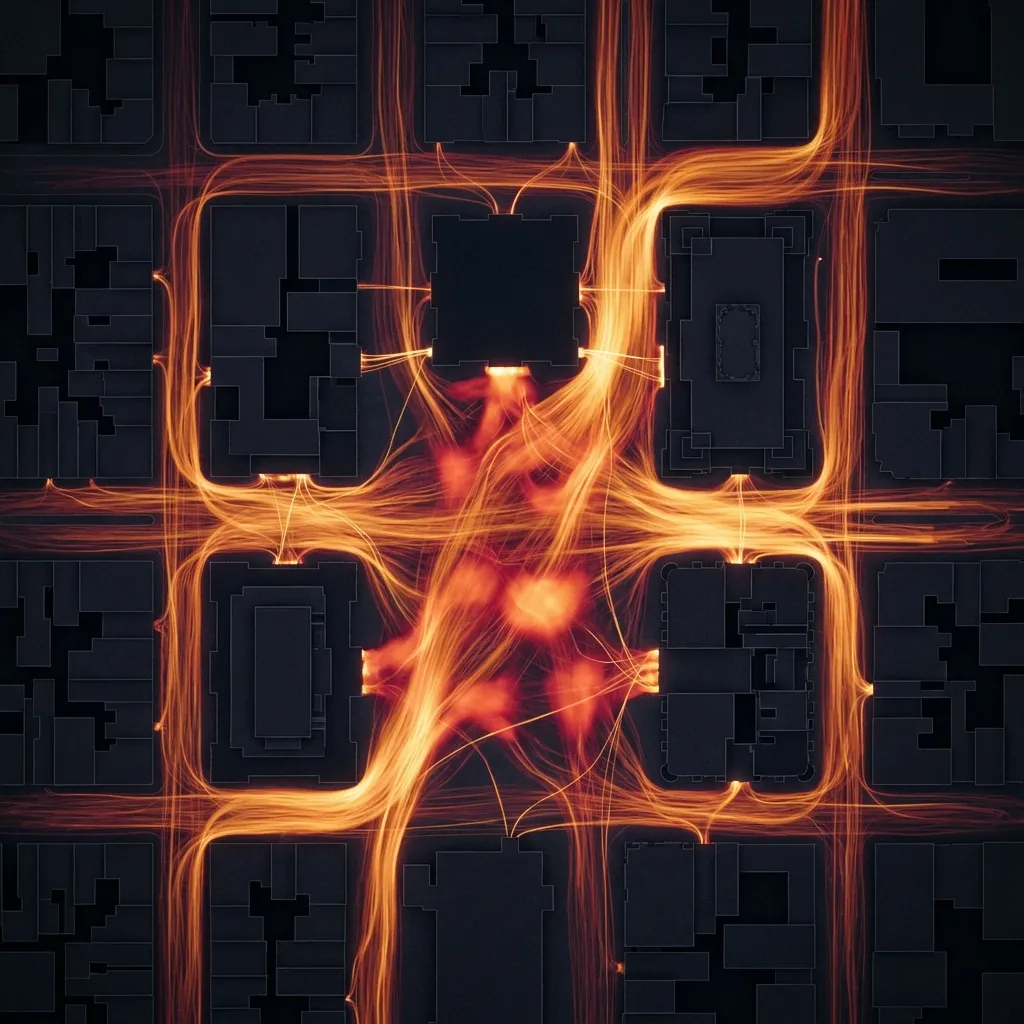
127.000 Ajan: Her renkli nokta simüle edilmiş bir kişi. Isı haritası nerede toplandıklarını gösteriyor.
Kuramsal Çerçeve
Evrimsel Optimizasyon
NSGA-II algoritması tasarım alanını keşfeder. İnsan önyargısı olmadan çelişen hedefleri dengeleyen çözümler bulur.
Ajan Tabanlı Simülasyon
Gerçekçi davranışlara sahip 127.000 sanal yaya. Yürürler, alışveriş yaparlar, işe giderler. Kalıpları tasarım kusurlarını ortaya çıkarır.
Çok Amaçlı Denge
Yoğunluk, yürünebilirlik, güneş ışığı, rüzgar konforu. Algoritma insanların görmekte zorlandığı ödünleşimleri bulur.
Kullanım Sonrası Doğrulama
Faz 1'i inşa ettik. Gerçek yaya sayıları simülasyonla %13 fark içinde eşleşti. Yöntem işe yarıyor.
Araştırma Süreci
Alan Verisi Topla
Belediye kaynaklarından CBS, trafik sayımları, demografi
Ajan Modeli Oluştur
Gözlemlenen davranışa göre kalibre edilmiş 127.000 ajan
Evrimi Çalıştır
NSGA-II bir gecede 5.000'den fazla varyantı test eder
Doğrula ve Tekrarla
Tahminleri gerçek dünya ölçümleriyle karşılaştır
Araştırma Aşamaları
Veri Toplama
CBS haritalama, trafik sayımları, demografik araştırmalar. Bilgisayara dokunmadan önce dokuz ay saha çalışması.
Ajan Kalibrasyonu
Kadıköy'de gerçek yayaları filme aldık. Görüntüleri yürüme hızları, güzergah seçimleri, durma kalıplarını kalibre etmek için kullandık.
Evrim Çalışmaları
5.000'den fazla tasarım varyantı bir gecede test edildi. Her biri simüle edildi, puanlandı ve hedeflere göre sıralandı.
Doğrulama
Faz 1 inşa edildi. Tahminleri gerçeklikle karşılaştırıyoruz. Şu ana kadar: %87 eşleşme.
Temel Metrikler
Öncü Düşünürler
Jane Jacobs
Jacobs yıllarca New York kaldırımlarını izledi. Gelişen sokakların karma kullanım, kısa bloklar ve sokağa bakan gözler gerektirdiğini gördü. Algoritmamız bağımsız olarak benzer kalıplar keşfetti.
Christopher Alexander
Alexander'ın Kalıp Dili insan davranışından ortaya çıkan tasarım kuralları önerdi. Ajan tabanlı yaklaşımımız bu kalıpları hesaplamalı olarak üretiyor.
Jan Gehl
Gehl yaya sayımını kentsel araştırma olarak icat etti. Yürünebilirlik metriklerimiz doğrudan onun yöntemlerini genişletiyor.
Kevin Lynch
Lynch şehirleri okunabilir kılan öğeleri belirledi: yollar, kenarlar, düğümler. Algoritmalarımız onun kriterlerine göre optimize ediyor.
Vaka Çalışmaları
Bilkent Kampüs Masterplanı
Ankara, Türkiye50 hektarlık bir üniversite genişlemesi. Binalar 5.000 iterasyon boyunca konumlarını 'buldu'. Akademik binalar arasındaki ortalama yürüme mesafesi %23 azaldı.
Kadıköy Doğrulama Çalışması
İstanbul, TürkiyeMevcut koşulları simüle ettik, sonra gerçek yaya akışlarını ölçtük. %87 korelasyon. Bu tüm metodolojiyi doğruladı.
Karşılaştırmalı Analiz
Geleneksel Masterplan
Mimar Çizer, Şehir İnşa EderÖrnek ve sezgiye dayalı. Bazen parlak, bazen felaket. İnşaat öncesi test etme imkânı yok.
Parametrik Şehircilik
Kurallar Form ÜretirGrasshopper tanımları varyantlar üretir. Manüelden daha iyi, ama hâlâ tasarımcı güdümlü.
Ajan Tabanlı Modelleme
İnşa Etmeden Simüle EtSanal yayalar tasarımı test eder. Sorunlar zemin kırılmadan önce ortaya çıkar.
Bizim Yaklaşımımız
Evrimleştir + Simüle EtEvrimsel algoritmalar seçenekler üretir. Ajan simülasyonları bunları test eder. Sadece doğrulanmış tasarımlar hayatta kalır.
Optimizasyon Sonuçları
Binalar nerede en yüksek olmalı? Algoritma bunu çözdü.
Temel Bulgular
Polisentrik tek tipe yener. Hem yoğunluk HEM DE yürünebilirlik için optimize ettiğimizde, algoritma sürekli olarak eşit dağılım değil 5 mini-merkez üretti.
5 küme optimalKüçük bloklar doğal olarak ortaya çıkar. Yürünebilirlik yeterince yüksek ağırlıklandırıldığında, algoritma 100m çevre altında bloklar üretir. Jane Jacobs haklıydı.
<100m blokTahmin mümkün. Simüle edilmiş ve gerçek yaya akışları arasında %87 korelasyon. Kentsel tasarım kanıta dayalı olabilir.
%87 doğrulukHız önemli. 24 saatte 5.000 varyantı test etmek, insanların asla keşfedemeyeceği tasarım alanlarını keşfedebileceğimiz anlamına geliyor.
24 saatte 5.000Dürüst Sınırlamalar
Çöp girerse çöp çıkar. CBS verilerimiz yanlışsa, tahminlerimiz de yanlış.
Rüzgar simülasyonu basitleştirilmiş. Semt ölçeğinde tam CFD haftalar sürer.
Ajanlar İstanbul'a göre kalibre edilmiş. Farklı şehirler farklı davranabilir.
Statik optimizasyon. Şehirler onlarca yıl boyunca değişir. Modelimiz tek bir anı yakalar.
Sonuç
Kentsel tasarımın tahmin yürütme olması gerekmiyor. 127.000 simüle edilmiş yaya ve %87 tahmin doğruluğuyla, mahalleleri inşa etmeden önce test edebiliyoruz. Algoritma Jane Jacobs'ın tanımladığı kalıpları buldu, ama bunları hesaplamalı olarak buldu. Planlamanın geleceği bu.
Sınırlamalar
- Boş alanlar için en uygun
- Şimdilik statik model
Gelecek Yönelimler
- Metropoliten ölçek genişleme
- Gerçek zamanlı izleme entegrasyonu